






İHTİYAÇLARINIZA TEKNOLOJİYİ KULLANARAK ÇÖZÜMLER SUNMAK EN ÖNEMLİ MİSYONUMUZDUR.
“Robot kavramı ve uygulamaları”, insan konforu ve güvenliğiyle ilgili temel kavramlarda ve uygulama niteliklerinde ilkesel düzeyde değişimlere yol açacak bilimsel ve teknolojik bir adımdır.
Robotik, makine mühendisliği beraberinde uçak mühendisliği ve uzay mühendisliği, elektronik mühendisliği, bilgisayar mühendisliği, mekatronik mühendisliği ve kontrol mühendisliği dallarının ortak çalışma alanıdır.
Robotlar bir yazılım aracılığıyla yönetilen ve yararlı bir amaç için iş ve değer üreten karmaşık makinelerdir. Robotik bütün dünyada olduğu gibi Ülkemizde de büyük ilgi görmektedir. Ülkemizde Robotik; Mekatronik adı altında anılmaktadır.
Robot teknolojisi, gelişen birçok bilimsel ve teknolojik olguların, robot adını verdiğimiz teknolojik ürünler üzerinde bütünleşmesini ve uygulanmasını içerir.
Robotik biliminin babası; Ktesibius’tur. Ktesibius çağını aşan pek çok çalışmalar yapmış, sibernetik ve robotik biliminin kurucusu olmuştur. Ondan sonra bilinen en büyük sibernetik uzmanlarından biri El-Cezeri’dir. Çağının çok ilerisinde robotlar yapmıştır. El Cezeri, Otomatik Makineler tarihinde Çağın Doruğuna Erişmiş Büyük Mühendis İbn-i Razzaz Cezeri adıyla anılır. Yazdığı kitabındaki tüm buluşlar estetik değerlere sahip ve hiçbiri hayal ürünü değildir. Bu buluşlar Alman Profesörü Widemann, tarafından tekrar üretilip çalıştırılmışlardır. Avrupalılar tarafından Al-Jasar olarak bilinmektedir.
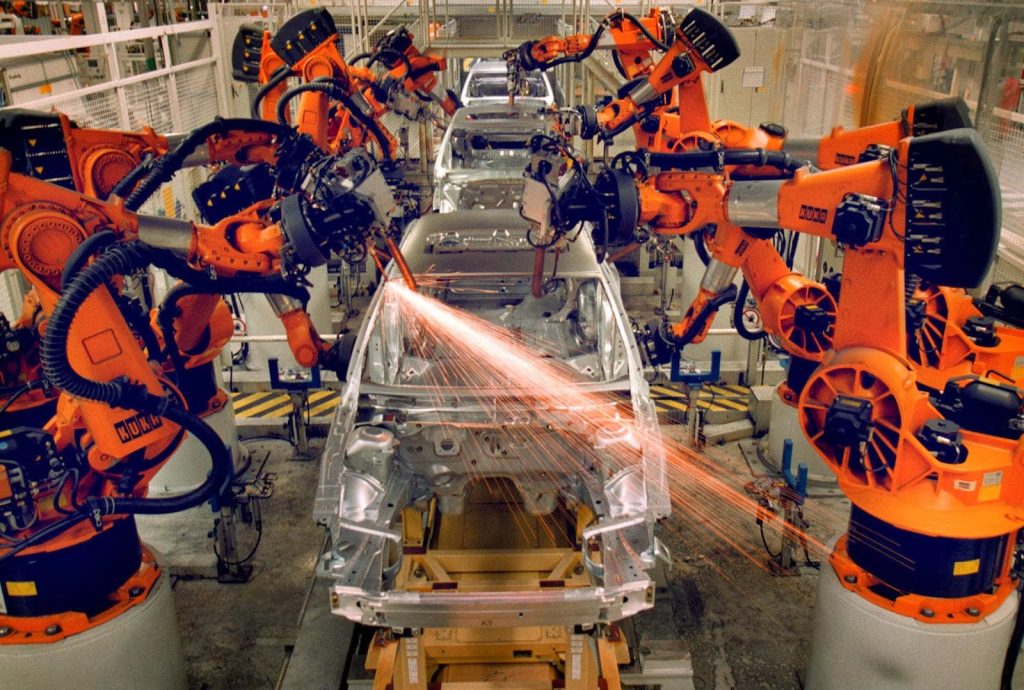
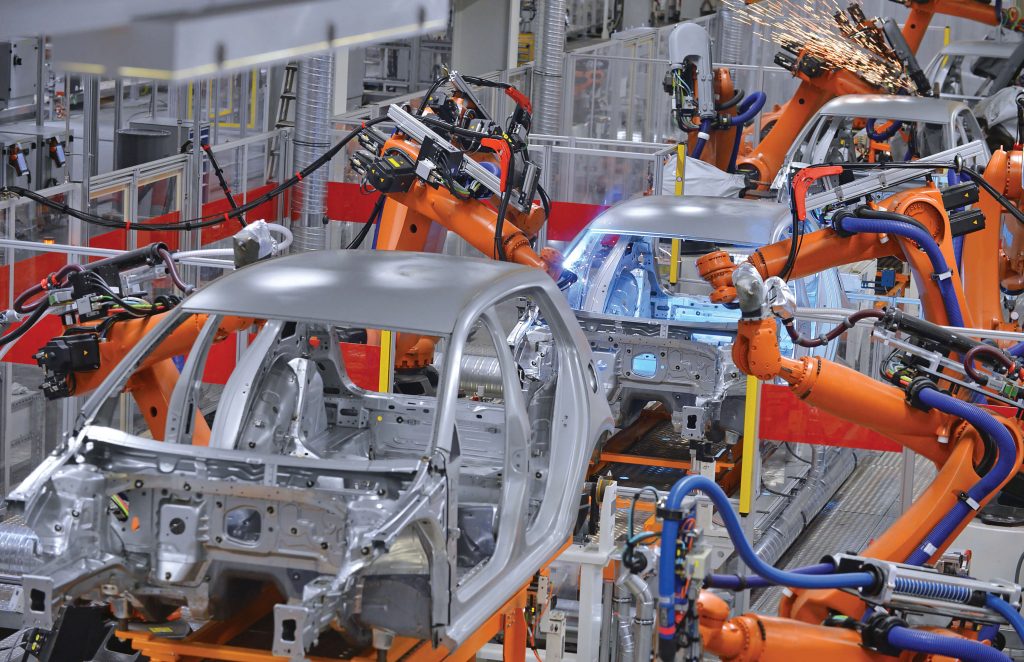
ENDÜSTRİYEL ROBOTİK
Endüstriyel uygulamalarda kullanılan, üç veya daha fazla programlanabilir ekseni olan, otomatik kontrollü, yeniden programlanabilir, çok amaçlı, uzayda sabitlenmiş veya hareketli manipülatördür.
ROBOTLARIN SINIFLANDIRILMASI
KOORDİNAT SİSTEMLERİNE GÖRE ROBOTLARIN SINIFLANDIRILMASI
Kartezyen koordinat sistemi,
Silindirik koordinat sistemi,
Küresel koordinat sistemi,
Döner koordinat sistemi.
ROBOT TİPLERİNE GÖRE SINIFLANDIRMA
Kartezyen robotlar,
Mafsallı robotlar,
Scara robotlar.
SCARA ROBOTLAR
Scara, Selective Compliance Assembly Robotic Arm kelimelerinin baş harflerinden oluşmuştur. Yani seçimlere uyan (faaliyet yerine getirme) montaj robot koludur. Bu robot 1970’ten sonra Japon Endüstriyel Konsorsiyomu ve bir grup araştırmacı tarafından Japonya’da Yamanashi Üniversitesi’nde geliştirilmiştir. Scara tipi robot, çok yüksek hızlara, en iyi tekrarlama kabiliyetine, yüksek hassasiyet ve doğruluk oranlarına sahip bir robot çeşididir.
SCARA TİPİ ROBOTUN ÖZELLİKLERİ
Doğruluk
Yüksek hız
Kolay montaj
Hassasiyet
Yüksek Verim
Günümüzde Scara tipi robotlar yaygın olarak birçok alanda kullanılmaktadır. Elektronik devre elemanlarının baskılı devre üzerine yerleştirilmesinde, elektromekanik olarak çalışan küçük cihazların ve bilgisayar disk sürücülerinin montajında bu robotlardan faydalanılmaktadır.
Elektronik devre elemanlarının yerleştirilmesi sırasında robotun tutucu kolu kullanılır. Bu kola alınan parça bakırlı plaket üzerinde önceden belirlenen yere yerleştirilir. Yerleştirme işlemi ve öncesi bilgisayar tarafından kontrol edildiğinden yapılan işlemlerde hata meydana gelmez.
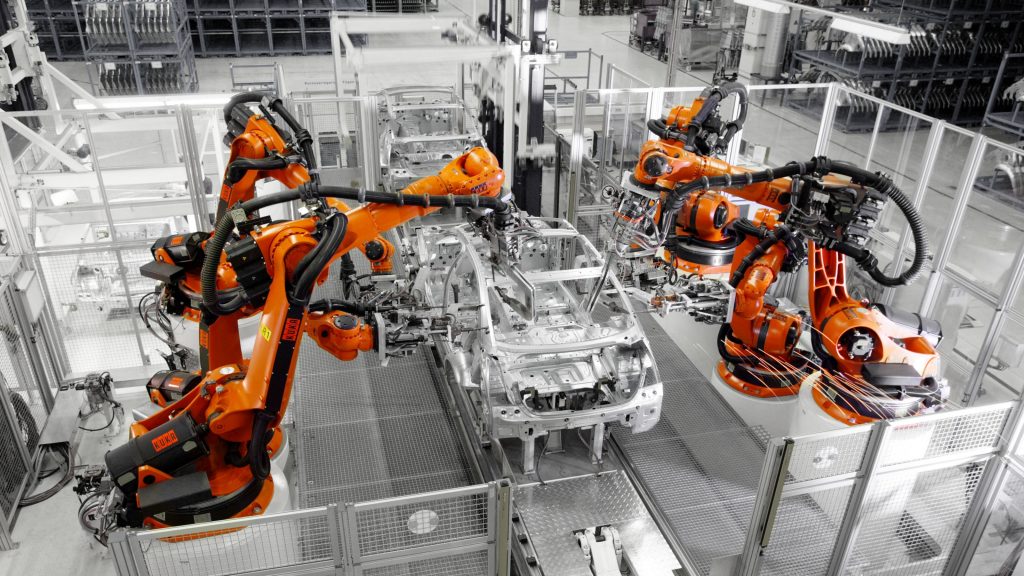
Robotların elektronik sanayiinde kullanılmasıyla birlikte seri üretim yapılmaya başlanmış ve kalite artmıştır.
Scara tipi robotlar; Dizme, yerleştirme, taşıma, paketleme, silikon çekme, delme, kesme, yapıştırma, kalite kontrol, ölçüm, test işlemleri, yükleme ve boşaltma gibi birçok üretim sürecinde yine Otomotiv, beyaz eşya, kimya, cam, mobilya, gıda, elektronik, metal, seramik, kâğıt gibi birçok endüstriyel sektörde kullanıma uygundur.
OPERASYONEL ROBOTİK
İnsanın yaşamasına elverişli olmayan ortamlarda çalışırlar. Örneğin Radyasyon ortamı, su altı, uzay vb.
Sistemler programlanabilir ve uzaktan kontrollüdür. Servo DC motor, hidrolik ve pnömatik sistemler tercih edilebilir. Yüksek teknoloji gerektirir. İhtiyaç duyulan amaçlara göre özel yaklaşımlar geliştirilir. Uzaktan yönetim için güç aktarım sistemleri (hidrolik veya pnömatik) veya radyo frekansı kullanılır.
TIP VE SAĞLIKTA ROBOTİK
ROBOTİK PROTEZLER (ORTOPEDİ)
Gelişmiş protezler piezo elektrik sensörlerle tendonlardaki gerilimleri (beyin komutlarını) algılayabilir ve parmaklara veya eksenlere gerilimin şiddetine göre güç gönderebilirler. Güç aktarımı servo motorlar ve yapay tendon sistemleriyle yapılır. Son zamanlarda bellekli metaller üzerinde çalışılmaktadır.
AMELİYAT ROBOTLARI (TIBBÎ OPERASYONLAR)
Tamamen adımlı motorlar ve hassas kontrollerle yapılan sistemler, kıtalar arası iletişimle cerrahların ameliyatlara katılmasını sağlamaktadır.
SİBERNETİK
KONSTRUKTİF MİMARİ (DIŞ GÖRÜNÜM VE BEDEN)
Amaç, sistemi canlı dokuya benzetmek olduğu için elektronik, malzeme bilimi, sibernetik ve tıp konunun içine girmiştir. Ayrıca konstruktif fizik, pnomatik, hidrolik ve makine gibi geleneksel mühendislik ve bilim kategorilerini de ilgilendirmektedir.
Bilinmelidir ki, KONSTRUKTİF MİMARİ; Plastik döküm yöntemleri, Üç boyutlu yaratım yeteneği ve sanatsal görüş gibi soyut yetenekleri de gerektirmektedir.